
В местности, где человеку небезопасно находиться либо не хочется работать, находят своё применение четвероногие роботы. Виртуальное пространство для тренировки — важный шаг в развитии сферы. Раньше алгоритмы движения формировались путём эксплуатации машины в реальности. Благодаря идее учёных перенести разработку в виртуальную эмуляцию, роботы начали обучаться в несколько раз быстрее.

Виртуальное обучение
Для работы виртуального пространства не потребовались большие вычислительные мощности. Разработка программы, способной функционировать на обычном персональном компьютере, сильно облегчила труд учёных. Новая система не только ускоряет обучение, но и делает его более качественным.
Благодаря этому робот может передвигаться быстрее на 25% и в целом стал более приспособленным к автономному функционированию:
- При падании способен подняться с довольно высокой скоростью и продолжить ходьбу.
- Если устройство столкнётся с непредвиденной преградой или получит удар в корпус, то не потеряет равновесие.
За время, необходимое для одного реального тестирования, программа успевает провести до тысячи тестов. Вдвойне эффективно то, что многие смоделированные ситуации было бы просто невозможно воспроизвести в реальности. Фактор, важный для развития робототехники в целом — общая дешевизна технологии, что сильно снижает стоимость программирования.
Преимущества четвероногих машин
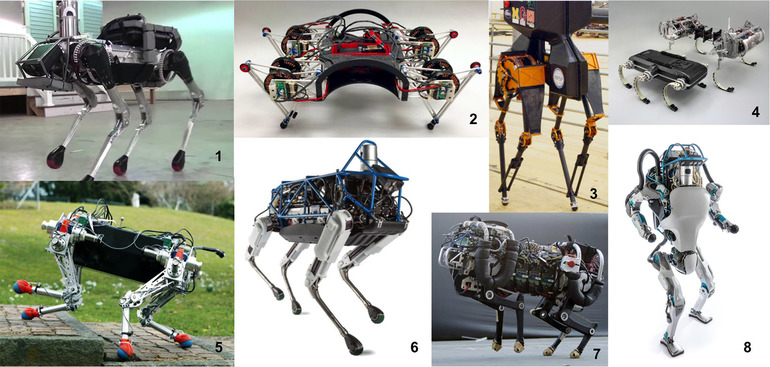
Четвероногие роботы гораздо практичнее двуногих. Последние очень плохо держат баланс, а при падении не могут встать или делают это с трудом. Четыре конечности позволяют устройству не падать даже после сильного удара ногой, а также развивать большую скорость. Если машина всё же не устоит, то на самостоятельный подъём уйдёт не так много времени.
А также эта форма организации условных «конечностей» потенциально позволяет передвигаться по местности с большими неровностями ландшафта. По этим причинам их разработка — приоритетное направление в робототехнике, если не учитывать летательные вариации аппаратов. Тем не менее новые методики виртуального тестирования применимы для роботов любых вариаций.







