
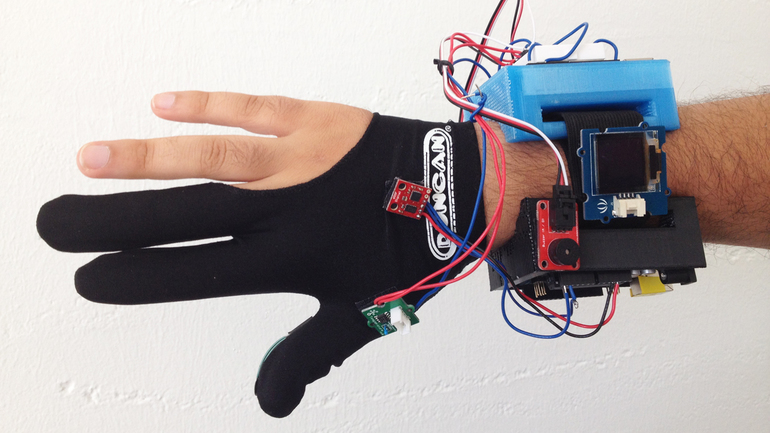
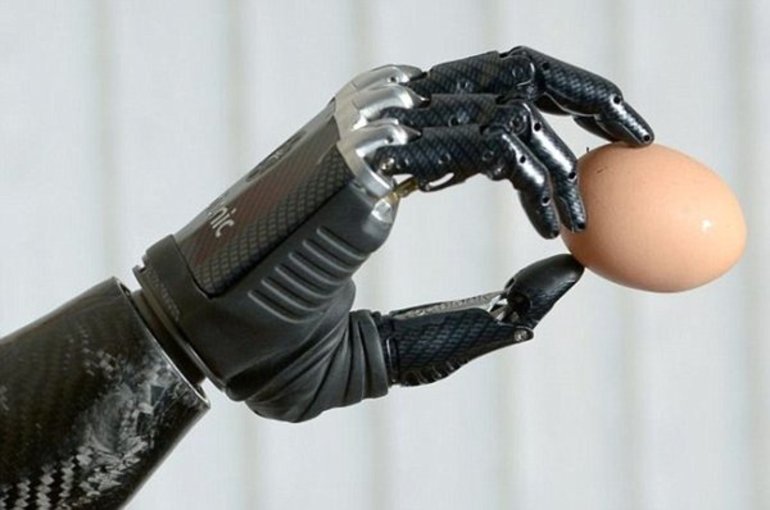
Ученые США из Стэнфордского университета разработали изделие для механической руки. В итоге электронная перчатка наделит роботов осязанием. Изобретение создано по принципу устройства человеческой руки. Достигается такое системой датчиков, встроенных в наружную поверхность пальцев. Это позволит аппарату удерживать в механической конструкции хрупкие предметы, не раздавливая и не ломая их.
Принцип осязания человеческой руки
По принципу устройства поверхностного слоя человеческой руки была сконструирована перчатка. Рецепторы, расположенные в коже человека, выполняют 2 основные функции:

- ведут измерение силы давления;
- определяют вектор его направления.
Рассматривая в разрезе человеческую кожу, видно, что сверху располагается кожный покров, а дальше идет шероховатый слой эпидермиса. Он представляет собой чередующиеся ряды выпуклостей и впадин.
Принцип работы заключается в следующем:
- При легком нажатии на предмет внешний слой кожи приближается к буграм эпидермиса. Начинается первичная реакция.
- При более сильном нажатии происходит касание низменных слоев. Это не вызывает болевых ощущений, но позволяет удерживать предмет на весу.
- Параллельно идет выявление направления воздействия.
Работа устройства
Этот же принцип был заложен в устройство. Вся поверхность перчатки засеяна датчиками как поле. В ней имеется 3 гибких слоя:
- Верхний и нижний слои — чувствительные и активные. Слой, расположенный внизу, так же имеет бугристую поверхность, как и эпидермис, в отличие от верхнего.
- Промежуточная прослойка является гибким изолятором, предотвращающим соприкосновение активных элементов.
Принцип работы такой же, как и у человеческой руки.
Во время прикосновения к предмету происходит надавливание на нижний слой, что вызывает в нем соответствующую реакцию. Конструкция очень чувствительная. Прикасаясь к нежным черенкам малины, механизм не ломает стебли.
В перспективе перчатка должна превратиться в кожный материал для механической руки. В процессе робот сам должен будет определять степень усилия, необходимого для совершения операции. Это не будет у него запрограммировано.
Информация о необходимом усилии будет поступать исключительно от датчиков.







